-
The Application of Robotics in K-12 Coding Education:A Systematic Literature Review
普通类 -
- 支持
- 批判
- 提问
- 解释
- 补充
- 删除
-
-
智慧学伴对学生动机和自主学习的影响
一、子问题
1. 智慧学伴的哪些功能或特性更能提升学生的内在或外在动机?
2. 在不同年级或年龄段的学生中,智慧学伴对学习动机的影响有何异同?
3. 智慧学伴对不同学科(比如文科与理科)学生的学习动机有无不同的影响?二、框架
引言
-
- 背景:智慧学伴的兴起和应用
- 研究的重要性:为何关注其对学生动机和自主学习的影响
- 综述的目的:对相关文献的总结和分析
智慧学伴定义与发展
-
- 定义:什么是智慧学伴
- 发展历程:智慧学伴的起源、阶段性发展和当前应用
- 过度简化学习任务、缺少深度学习等
- 相关研究文献的总结和分析
实践应用与案例分析
-
- 如何在实际教学中整合智慧学伴以增强学生动机和自主学习
- 典型的应用案例及其效果分析
讨论与未来研究方向
-
- 当前研究的局限性
- 未来的研究趋势和方向
- 对教育实践的建议和启示
结论
-
- 综述的主要发现
- 对学者和教育工作者的建议
参考文献
-
论文阅读01
一、论文基本信息
- 标题:Reading with Robots: A Personalized Robot-Based Learning Companion for Solving Cognitively Demanding Tasks
- 作者:Azizi Ab Aziza,1, Hayder M.A. Ghanimia,2
- 期刊:International Journal on Advanced Science Engineering;Vol.10 (2020) No. 4
二、摘要和关键词
2.1 摘要
该论文提供了一个阅读伴侣机器人(IQRA)的过程、设计视角,该机器人在一个要求很高的阅读任务中监控读者的认知负荷水平,并为读者完成任务提供支持。目前的技术解决方案只涵盖了应用程序的外部设计方面,并且没有自适应机制来处理与读者的视角和环境相关的动态问题。受认知心理学领域的一些理论的启发,建立了一个认知负荷的计算模型,作为推理和分析目的的基础。这种分析能力为机器人提供了一种计算机制,以类人的方式进行推理,并分析观察条件的功能。这对于提供更明智的行动和更明智的分析至关重要。此外,还介绍了机器人的物理和软件设计以及人机交互的基本概念。此外,作者选择了5个评估结构来评估基于机器人的能力。这些结构包括:与社会存在的可能性、感知智力、社交能力、社会存在性和认知负荷。初步研究的总体结果支持了我们提出的机器人实际使用的解决方案。
2.2关键词
cognitive load modelling; personalized user system; personalized reading companion
三、研究问题和研究目的
3.1 研究问题
- 设计一个阅读伴侣机器人(IQRA)监控学习者的认知符合水平,并为读者完成阅读任务提供支持。
3.2 研究目的
设计并实现一个阅读伴侣机器人。
从5个评估结构来评估机器人能力。
四、研究方法
4.1 实验设计
机器人设计
人机界面
相互作用机制
社交问候语和“代理功能”
硬件
认知负荷分析的计算模型
Connection weights characterize the strength of the connection.
Combination functions aggregate the causal impacts of more than a state on one state (e.g., sum function).
Speed factors represent the speed of change based on temporal effects (causal impact).
软件设计
评估机器人的能力
招募马来西亚乌塔拉大学计算机学院的几名本科生参与数据结构和算法分析阅读任务(如河内塔谜题)。在IQRA的帮助下,他们得到了一个小时的时间。这些学生的选择是基于选定的标准,如在这门学科上的表现低于平均水平(即得分较低)。这些标准背后的原因是为了确保他们在实验过程中会经历一个较高的认知负荷水平。此外,它们都来自一个同质组,以消除任何可能的实验偏差。基于研究调查方法开发的数据收集工具是封闭式问题,并使用半结构化访谈从受访者那里获得令人信服的见解。
测量了受访者的人口统计学信息和系统的可用性。在本研究中,研究者使用7分语义差异量表来测量用户对使用阅读同伴机器人的印象。认知负荷采用7分李克特量表问卷测量认知负荷。
在实验快结束时,参与研究的受访者得到了茶点(饮料和零食)和一份特别的礼物,以表示感谢。
4.2 样本
实验招募了10名学生(8名男性和2名女性),年龄19-24岁(平均21.5岁,SD=1.4岁),其中大多数是马来西亚人(通过入学、STPM或文凭入学)
此外,它们都来自一个同质组,以消除任何可能的实验偏差。
4.3 测量和分析方法
基于研究调查方法开发的数据收集工具是封闭式问题,并使用半结构化访谈从受访者那里获得令人信服的见解。
7分语义差异量表来测量用户对使用阅读同伴机器人的印象,其中有不同方面的测量。这些方面包括:可爱性、感知智力、社交性和社交存在性
认知负荷采用7分李克特量表问卷测量认知负荷。此外,还获得了与继续使用该系统的愿望、使用机器人时所给予的支持的满意度和动机相关的问题
五、主要发现
5.1 研究结果
对应与可用性相关的数据,发现机器人的功能水平相当高(平均=6,SD=0.47)。结果表明,所提出的阅读配套机器人易于使用,且不复杂。
对于与可爱和感知智能相关的研究,结果显示,参与者喜欢机器人(Mean=5.74,SD=0.65),并将机器人视为智能伙伴/伙伴(Mean= 5.48,SD=0.51)。
对于社交性结构,结果显示,参与者认为IQRA是一个系统,可以执行社交行为,平均=为5.43和SD=为0.65
在认知负荷测量中,被试解决分配任务所经历的平均认知负荷水平逐渐下降。
5.2 研究结论
阅读同伴机器人可以减少经验丰富的认知负荷。
-
论文阅读02
Study on the application of Artificial Intelligence Technology in Empowering Education_论文阅读02
- author: lanjm
- title: Study on the application of Artificial Intelligence Technology in Empowering Education_论文阅读02
- rating:
- time: 2023-10-15 周日
- tags:
- Source:
一、论文基本信息
- 标题:Study on the application of Artificial Intelligence Technology in Empowering Education
- 作者:Xinglong Li; ZhiHeng Ma; Yujuan Tu; YinShi Du (北京师范大学)
- 期刊: 2021 2nd International Conference on Information Science and Education (ICISE-IE)
二、摘要和关键词
2.1 摘要
随着人工智能技术,社会已进入人工智能时代,智力与生活的方方面面融为一体。人工智能在教育中的应用越来越受到人们的关注。人工智能技术是如何发展的?本文采用“智能学习伙伴”,一款教育产品集成了北京的多项智能技术师范大学未来教育高级创新中心及其在教学中的三个应用案例实践:1.基于“智能学习伙伴”的混合模式教学模式的探索与分析2.智能学习促进精准探索初中历史教学学科能力培养的应用模型研究3.学科能力培养的应用模型研究评价教与学体系
2.2关键词
artificial intelligence;education;technology; “Smart Learning Partner”
三、论文框架
引言
人工智能及其关键技术对教育的影响
人工智能及其发展历史
1. 繁荣发展时期(1950s-1960s)
2. 缓慢发展时期(1970s)
3. 持续发展时期(1980s-21st)
4. 快速发展期(2010s-present)教育人工智能的关键技术
云计算
大数据
互联网
NLP
人工智能教育的典型案例——智能学伴
智能学伴导入
智能学伴是一个由北京师范大学未来教育中心开发的一个自适应学习平台。智能学伴的关键技术
知识图谱
机器学习
NLP
“智能学伴”教学案例分析
“智能学伴”在混合教学模型上的探索
“智能学伴”促进中学历史教学
学科能力发展评价体系的构建与应用模式研究
总结
-
论文题目进一步思考_调整为教育机器人对学生自主学习的影响
. 引言
- 当前教育机器人的普及情况和研究的重要性。
2. 教育机器人的背景与定义
- 教育机器人的基本定义和分类。
- 历史背景和发展趋势。
3. 教育机器人如何促进自主学习
- 个性化学习
- 定制化的学习路径和内容。
- 根据学生需求的实时调整。
- 互动性
- 实时反馈和互动的重要性。
- 增强学习效果的方法和技术。
- 游戏化学习
- 如何使学习过程更有趣。
- 游戏化学习与自主学习的关系。
4. 教育机器人可能带来的挑战
- 过度依赖
- 对学生社交和合作能力的潜在影响。
- 数据隐私
- 学生数据收集和泄露的风险。
- 教育资源不平衡
- 教育机器人与教育公平性的问题。
5. 实际应用与案例研究
- 选取具体的教育机器人产品或解决方案。
- 分析这些产品在真实教学环境中的应用效果。
6. 未来展望
- 技术进步对教育机器人的潜在影响。
- 如何确保机器人技术既支持自主学习,又不损害学生的其他能力?
7. 结论
- 综述整体研究的重要发现。
- 对教育机器人在学生自主学习中作用的总结。
-
第八周
题目调整为 The theory and Practice of robotics in K-12 coding Education—A Systematic Review
-
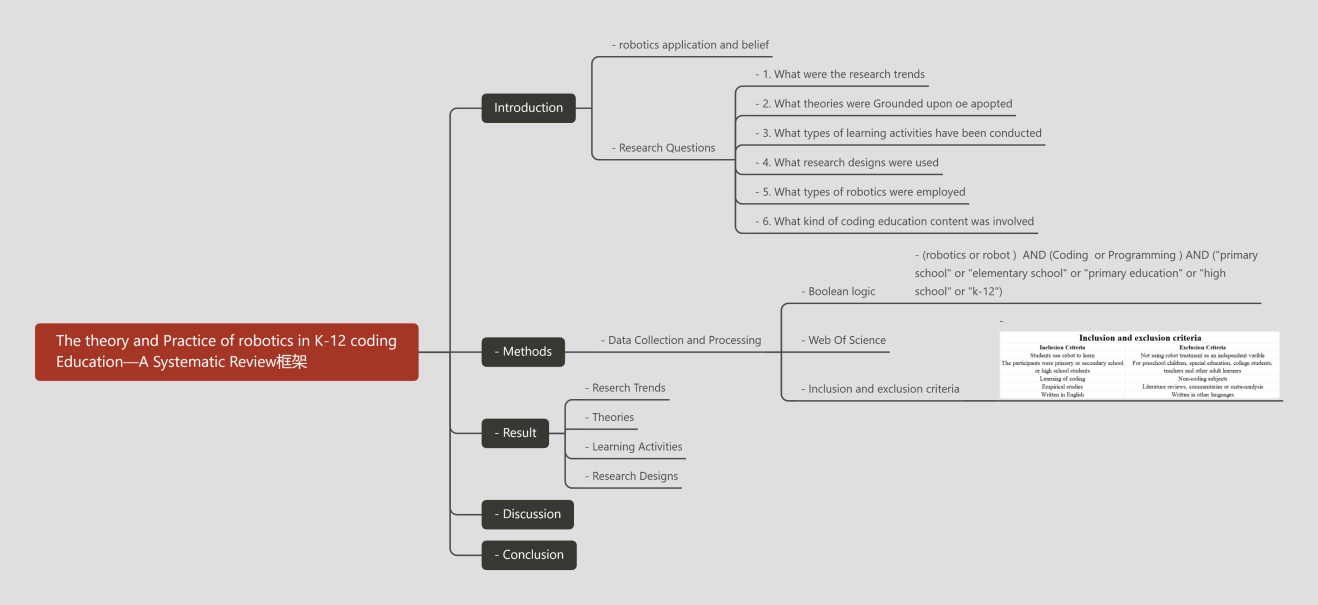
The theory and Practice of robotics in K-12 coding Education—A Systematic Review框架
the theory and practice of robotics in k-12 coding education—a systematic review框架thetheory and practice of robotics in k-12 coding education—asystematic review框架
标题:thetheory and practice of robotics in k-12 coding education—asystematic review
introduction
robotics application and belief
research questions
what were the research trends
what theories were grounded upon oe apopted
what types of learning activities have been conducted
what research designs were used
what types of robotics were employed
what kind of coding education content was involved
methods
data collection and processing
boolean logic
(robotics or robot ) and (coding or programming ) and ("primary school" or "elementary school" or "primary education" or "high school" or "k-12")
web of science
inclusion and exclusion criteria
result
reserch trends
theories
learning activities
research designs
discussion
conclusion
-
r_studieson robotic coding education in science education: a systematicliterature review
introduction
method
systematic literature review
five steps
formulate the research question
define inclusion/exclusion criteria
recording relevant studies systematically
evaluate the quality of selected studies
integrate major findings
research questions
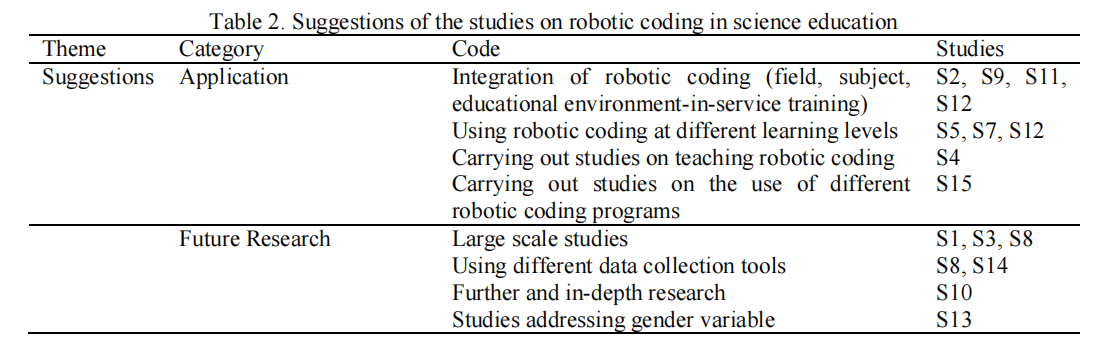
present a synthesis of the empirical evidence available so far on robotic coding in science education
submit suggestions for future studies on robotic coding in scirnce education based on reviewed literature
inclusion-exclusion criteria
systematic search protocol
data collection process
search duration
quality appraisal
integration of analysis results
results and discussioin

conclusion
这篇系统文献综述的研究结论是,机器人编码教育在科学教育中的应用可以促进学生的21世纪技能和计算思维技能的发展,同时也有助于科学概念和科学探究技能的培养。然而,需要更多的实证研究来测试机器人在教育中的益处
-
R_A systematic review on teaching and learning robotics content knowledge in K-12 (1)
r_a systematic review on teaching and learning robotics content knowledge in k-12
-
r_asystematic review on teaching and learning robotics content knowledgein k-12
期刊:computers& education
作者:liyingxia;baichangzhong
doi:10.1016/j.compedu.2018.09.007abstract
main factors
sample groups, duration, robot types, robotics content knowledge, study type, intervention approaches, measurement instruments, major findings and instructional suggestions.
1. introduction
(1) to systematically review high-quality empirical studies on teaching and learning robotics content knowledge in k-12
(2) to explore future research perspectives of re based on the reviewed papers.
questions
q1: how have robotics been incorporated into k-12?
q2: what intervention approaches are effective in teaching and learning robotics content knowledge?
q3: what implications for teaching are indicated by these empirical studies?
2. methods
database isi web of science
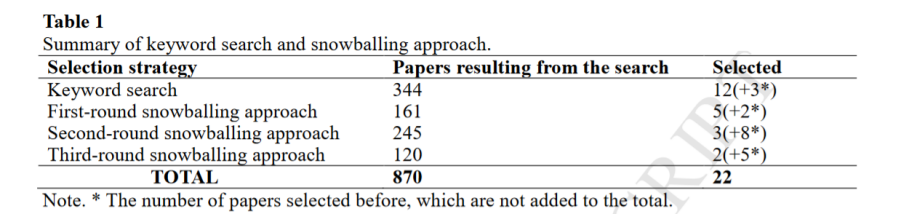
snowballing
snowballing approach refers to using the reference list of a paper or the citations to the paper to identify additional papers for a literature review (wohlin, 2014).
step
step 1. start set: identify a starting set of papers for the snowballing approach from the leading journals in the field.
step 2. backward snowballing: go backward by looking at the reference lists of the papers identified in step 1 to determine which papers are qualified for your literature review.
step 3. forward snowballing: go forward by looking at the citations to the papers identified in step 1 to determine which papers are qualified for your literature review.
2.1 keyword search
“robot* and (education or instruction or school or curriculum or curricula or course or student or child* or learn*)”
2.2 snowballing approach
3. results
3.1. how have robotics been incorporated into k-12




3.2. what intervention approaches are effective in teaching and learning robotics content knowledge?
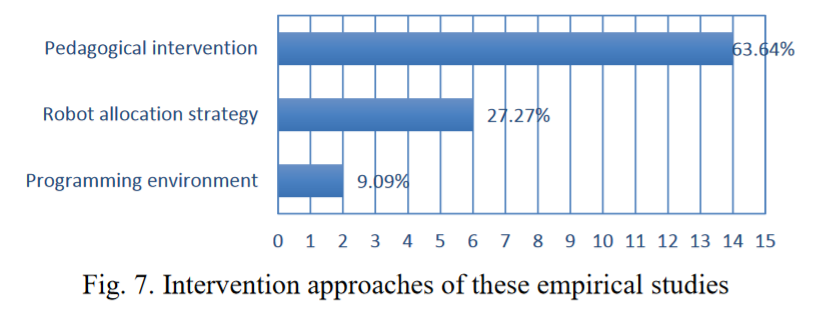
as shown in table a.2, we classified the 22 papers into non-experimental, quasi-experimental, and (true) experimental design according to the taxonomy of benitti (2012) and trochim and donnelly (2006).

three categories emerged: (1) pedagogical intervention, (2) robot allocation strategy and (3) programming environment (see fig. 7).
gender difference
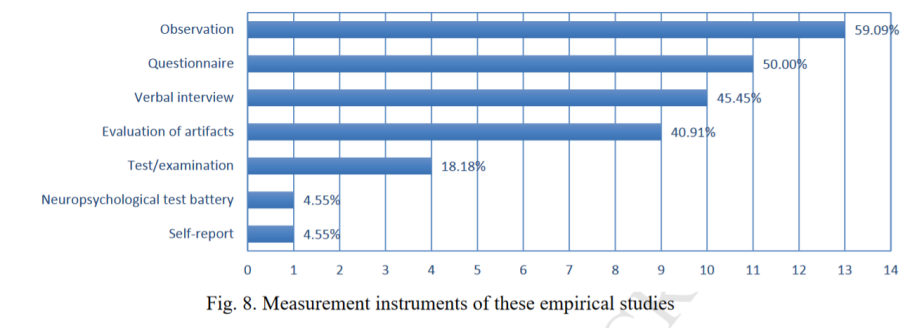
seven measurement instruments
(1) observation, (2) questionnaire, (3) evaluation of artifacts, (4) verbal interview, (5) test/examination, (6) neuropsychological test battery and (7) self-report (see table a.2).
3.3. what implications for teaching are indicated by these empirical studies?
3.3.1. environment of re activities
large and open classroom
appropriate hardware and software
collaborative and creative learning atmosphere
3.3.2. design of re activities
content design
time allocation
activity organization
3.3.3. pedagogy of re activities
3.3.4. support of re activities
preparation
guidance
feedback
4. discussion
4.1. incorporation of robotics into k-12

4.2. effective intervention approaches in teaching and learning robotics content knowledge
4.3. instructional implications for k-12
5. conclusion
-
第九周 题目进一步润色
The Application of Robotics in K-12 Coding Education: A Systematic Literature Review
-
第九周 进度记录
已完成论文一筛
-
第九周 论文阅读01
第九周 论文阅读01第九周 论文阅读01
-
论文基本信息
标题:assessingelementary students' computational thinking in everyday reasoning androbotics programming
期刊:computers& education-
实验设计
作者开发了机器人课程,并在美国东南部城市的一所一级公立小学实施。在实施前的夏季提供了为期三天的教师专业发展研讨会,涵盖了机器人平台的基础知识和课程中的主要主题。然后,从秋季开始实施了为期六个月的课程,每周课程持续45 到 60分钟。在课程期间,每个学生都在自己的笔记本电脑上使用可视化编程平台进行工作。并且由于成本原因,只使用了一台实体机器人。因此,学生必须先编写程序并在虚拟机器人上进行测试,然后轮流在物理机器人上运行测试过的程序。除了最初和最后的课程外,课程是围绕人形机器人常见的特定主题进行组织的,例如基本动作(说词、挥手、坐下等)、语音识别、触觉传感器、行走动作和动画片。此外,在此过程中还介绍了几个关键的计算机科学概念,例如算法、变量、条件、循环、串行执行和多任务处理。课程中包括四个迷你项目和一个期末项目。这些项目旨在帮助学生在机器人技术和日常环境之间建立联系,包括对机器人进行编程以执行诸如进行对话、走向目的地和表演舞蹈等任务。
-
采用的机器人设备
使用可视化编程平台进行工作。并且由于成本原因,只使用了一台实体机器人
-
被试
该校当年招收了 767名学生(性别:48.8%女性,51.2% 男性;种族:40.8%黑人,24.8% 西班牙裔,23.1%白人,6.9% 亚洲人,0.4%印度人,4.0%两个或以上种族)。他们整个五年级(六个教室;n=125)都采用了该课程。
-
研究结论
1.参与机器人课程对i 级起点高的学生和起点低的学生都有好处,其程度与该仪器中观察到的相同。2.与i 类学生类似,来自 ii类的预测分数不同的学生平均获得相同的学位。
3.总的来说,两个班的学生在数据处理方面都没有进步。4.ii在日常推理环境中获得的程度与在编程环境中获得的程度大致相同,而来自i 类的学生在日常推理环境中仅获得了中等程度的程度。-
第九周论文阅读02
第九周论文阅读02第九周论文阅读02
-
论文基本信息
标题:usinghaptic and auditory interaction tools to engage students with visualimpairments in robot programming activities
期刊:ieeetransactions on learning technologies-
实验设计
该研究在为期两周的夏令营中吸引了九名有视力障碍的中学生。该试点研究展示了利用多种交互模式让视力障碍学生参与传统机器人编程过程的可行性。发现的一项关键观察结果是,对机器人运动产生误解的最大因素是区分左转和右转的反馈信号。
-
采用的机器人设备
传统机器人
-
被试
九名具有不同计算机经验水平的中学生(视障)大多数人都有使用计算机的经验,但只有少数人有编程经验
-
研究结论
大多数情况下,成功设计正确解决方案的试验次数会根据完成机器人任务所需的技能水平而增加。特别有趣的是根据学生的经验评估他们观点的变化。表5 突出显示了看法的变化(选项范围为很多1⁄4 4;一些 1⁄43;一点 1⁄4 2;无1⁄41)。根据营前的看法,人们对使用计算机/机器人工作的愿望略有一致,但反应存在很大偏差。参加机器人编程课程后,可以注意到,学生们对于考虑将计算机/机器人工作作为职业可能性的看法更加一致,偏差较小。
-
第九周 论文阅读03
第九周 论文阅读03第九周 论文阅读03
-
论文基本信息
标题:theeffects of a robot game environment on computer programming educationfor elementary school students
期刊:ieeetransactions on education-
实验设计
预测试测量了学生的编程态度和对编程概念的理解。然后,表iii 可用性和教育问卷结果中的学生在实验班参加了8小时的活动。最后,后期测试衡量了可用性、娱乐性、编程态度以及对编程概念的理解。最后一项是对编程概念的理解,仅针对五年级和六年级的学生(30名学生)进行了评估;没有对四年级学生进行测试,因为他们不习惯两层测试格式的问题,并且发现很难理解伪代码类型的编程概念问题。
-
采用的机器人设备
1)基于有形用户界面的编程工具:a-bricks是基于tui的编程工具,其指令即使是小学生也能直观地理解。a-bricks是为了让孩子们能够通过连接和堆叠命令块来体验编程活动而开发的。此外,学生可以自发地学习基本的编程概念(序列、重复、条件和分支、函数和参数)。表i 给出了十个 a-bricks命令及其描述。
-
被试
参加者为48名小学生。18 名四年级学生(年龄 =10),18 名五年级学生(年龄= 11),12名六年级学生(年龄 = 12)。
-
研究结论
1.所提出的编程环境的可用性和寓教于乐性元素的结果表明,通过使用娱乐性游戏,小学生可以有效地参与编程活动并实现教育效率。
2.所提出的有形编程环境对学生的编程态度产生积极影响,特别是帮助他们将编程视为一项有价值且有意义的活动。3.如果为小学生提供机器人游戏环境的可用性和寓教于乐性,就可以通过帮助他们专注于解决问题的活动来减轻他们的认知负荷并提高他们解决问题的能力-
第九周 论文阅读04
第九周 论文阅读04第九周 论文阅读04
-
论文基本信息
标题:theinfluence of sra programming on algorithmic thinking andself‐efficacy using lego robotics in two types ofinstruction
期刊:internationaljournal of technology and design education-
实验设计
两种指令变体的所有 31对都获得了相同的介绍性指令,逐步解释如何使用乐高编程环境。此后,每组进行了九次一小时的会议来解决二十个编程任务。演示所设计的解决方案。在直接教学中,在九小时的培训课程中向学生提供了如何对使用传感器的机器人进行编程的信息和解释。在脚手架变体中,在九小时的培训课程中对学生进行指导,根据学生对如何使用传感器进行机器人编程的理解水平提供指导。在这两种教学方式中,学生可以自行决定是在不使用传感器的情况下进行编程,还是在功能齐全且最有效地使用传感器的情况下进行编程。在最后的挑战作业中,学生可以展示他们从这些编程任务中学到了什么,以及两种教学变体之间存在哪些差异。
-
采用的机器人设备
scratch 和lego mindstorms等面向视觉的编程环境非常适合在小学教育中使用(korkmaz2018)。无需学习复杂的基于文本的代码语言,用户可以按正确的顺序拖放可编程块(weintrop和 wilensky2015)。可视化编程环境也非常适合控制机器人等有形物体(sapounidis等人,2015)。
-
被试
这项研究是在荷兰南部一所小学的5 年级和 6年级 (n = 62) 学生中进行的。形成实验组(n= 33)和对照组(n =29)。从这两个小组中,根据荷兰 cito计算能力和数学技能跟踪分数(cito1987)中个人数学分数的平均值,编制了 31个同等强的配对。这样就不会存在很强或很弱的子组,因此不会掩盖结果。图3显示了参与组的划分。
-
研究结论
1.指令变量(直接指令/脚手架)会影响所创建解决方案的质量和编程机器人的执行时间。
2.更开放的形式(脚手架)可以改善结果。
3.使用脚手架教学方法比使用直接教学能显着提高自我效能水平的假设无法得到证实。
4.sra编程本身似乎是计算思维的一个未被明确识别的特征。-
第九周 论文阅读05
第九周 论文阅读05第九周 论文阅读05
-
论文基本信息
标题:cultivatingstudents' computational thinking through student-robot interactionsin robotics education
期刊:internationaljournal of technology and design education-
实验设计
在为期四个星期的夏令营中,每周三次,总共有12 节课和 11项解决问题的任务(第一节课是机器人硬件和软件的介绍)。具体来说,要求学生设计并制作一个机器人来完成给定的任务(见“附录1”),例如制作一个可以前进、转身、沿着黑线行驶的车辆;制作越野车、电风扇和玩具陀螺仪;制作一个有两条腿的“行走”机器人;制作足球机器人。在设计和创作的过程中,学生需要解决各种搭建和编程问题。每节课时长90分钟,其中学生完成课程任务的时间约为70分钟,教师描述课程任务并介绍完成任务所需的知识和概念的时间为10分钟,学生展示和反思自己的作品的时间为10分钟。完成任务,并有10 分钟的时间让学生展示和反思他们的作品。
-
采用的机器人设备
kaziev5是一款可编程机器人套件,是kazi机器人教育公司(中国深圳)的产品。kazi ev5被用于本研究组织的夏令营中。kazi ev5 最令人向往的特点是其功能和质量与乐高的mindstorms education ev3 套装相同,而且kazi ev5 的价格非常便宜(比乐高套装便宜约280美元)。夏令营使用的编程语言是麻省理工学院(mit)开发的可视化编程语言scratch。scratch是re领域流行的可视化编程语言,深受幼儿的喜爱。它允许用户只需很少的正式培训即可创建简单的程序。相反,它也可用于开发复杂的复杂程序(olabe等人,2010 年,第 359页)。学生可以拖动图形和彩色块来开发他们的设计(bers,2010;maloney等人,2010)。
-
被试
夏令营的 40名学生是自愿随机招募的。已获得所有学生家长的同意。这些学生来自当地多所小学,年龄在七至九岁(即一年级至三年级)。根据参与者的喜好,他们被分配到四个班级,每个班级由10名参与者组成。所有课程在教师、场地、课程、设施和持续时间方面都是相同的。在数据分析过程中,四个班级的所有参与者都被视为一个组。40名参与者中,有两人在夏令营期间退学,还有六人至少缺席一节课。夏令营结束时,共有32 名参与者(10名女性和 22名男性)完成了所有课程,因此可以在整个夏令营期间收集数据。除了参与的学生外,一名老师也参与了这项研究。这位敬业的机器人老师负责夏令营的教学活动。老师是一名当地25岁男性,教育学学士学位,有三年小学生机器人教学经验;他之前有在课程中使用kazi 机器人套件和 scratch的经验。这是他第二次作为老师参加机器人夏令营。
-
研究结论
关于效果大小上述结果的功效和作用,所有结果的效应大小都处于中等到高水平,功效也很高。
每个学生花在 s-r 互动上的时间都被计算在内;然后,通过 spearman 相关分析来检验学生 ct 技能的提高与 s-r 互动所花费的时间之间的关系。结果表明呈正相关,rs(30) = 0.51,p = 0.003。
三种s-r交互(编程-计算、观察性调查和参与式调查)在培养学生的ct能力方面发挥着重要作用。-r 交互,包括编程计算、观察性调查和参与式调查,显示出培养学生 ct 技能的潜力。这些类型的 s-r 交互允许学生边做边思考,将抽象的程序设计和调试与具体的机器人行为联系起来。
-
创新点
之前的研究很少讨论 s-r交互,然而,应该对其进行探索,因为它提供了更多关于学生自然学习过程的信息,这可能对re 实践有意义(jung& won,2018)。
-
第十周 进度记录
基本完成论文二筛,有几篇文献需要付费才能下载,其余已经筛选完毕。
-
接下来计划
仔细阅读已经筛选好的文献,根据编码要求进行归类。
-
第十周 论文阅读01
第十周 论文阅读01第十周 论文阅读01
-
论文基本信息
标题:theconsequences of robotics programming education on computationalthinking skills: an intervention of the young engineer's workshop(yew)
期刊:computerapplications in engineering education-
实验设计
在为期四个星期的夏令营中,每周三次,总共有12 节课和 11项解决问题的任务(第一节课是机器人硬件和软件的介绍)。具体来说,要求学生设计并制作一个机器人来完成给定的任务(见“附录1”),例如制作一个可以前进、转身、沿着黑线行驶的车辆;制作越野车、电风扇和玩具陀螺仪;制作一个有两条腿的“行走”机器人;制作足球机器人。在设计和创作的过程中,学生需要解决各种搭建和编程问题。每节课时长90分钟,其中学生完成课程任务的时间约为70分钟,教师描述课程任务并介绍完成任务所需的知识和概念的时间为10分钟,学生展示和反思自己的作品的时间为10分钟。完成任务,并有10 分钟的时间让学生展示和反思他们的作品。
-
采用的机器人设备
kaziev5是一款可编程机器人套件,是kazi机器人教育公司(中国深圳)的产品。kazi ev5被用于本研究组织的夏令营中。kazi ev5 最令人向往的特点是其功能和质量与乐高的mindstorms education ev3 套装相同,而且kazi ev5 的价格非常便宜(比乐高套装便宜约280美元)。夏令营使用的编程语言是麻省理工学院(mit)开发的可视化编程语言scratch。scratch是re领域流行的可视化编程语言,深受幼儿的喜爱。它允许用户只需很少的正式培训即可创建简单的程序。相反,它也可用于开发复杂的复杂程序(olabe等人,2010 年,第 359页)。学生可以拖动图形和彩色块来开发他们的设计(bers,2010;maloney等人,2010)。
-
被试
夏令营的 40名学生是自愿随机招募的。已获得所有学生家长的同意。这些学生来自当地多所小学,年龄在七至九岁(即一年级至三年级)。根据参与者的喜好,他们被分配到四个班级,每个班级由10名参与者组成。所有课程在教师、场地、课程、设施和持续时间方面都是相同的。在数据分析过程中,四个班级的所有参与者都被视为一个组。40名参与者中,有两人在夏令营期间退学,还有六人至少缺席一节课。夏令营结束时,共有32 名参与者(10名女性和 22名男性)完成了所有课程,因此可以在整个夏令营期间收集数据。除了参与的学生外,一名老师也参与了这项研究。这位敬业的机器人老师负责夏令营的教学活动。老师是一名当地25岁男性,教育学学士学位,有三年小学生机器人教学经验;他之前有在课程中使用kazi 机器人套件和 scratch的经验。这是他第二次作为老师参加机器人夏令营。
-
研究结论
关于效果大小上述结果的功效和作用,所有结果的效应大小都处于中等到高水平,功效也很高。2.每个学生花在 s-r 互动上的时间都被计算在内;然后,通过 spearman 相关分析来检验学生 ct 技能的提高与 s-r 互动所花费的时间之间的关系。结果表明呈正相关,rs(30) = 0.51,p = 0.003。3. 三种s-r交互(编程-计算、观察性调查和参与式调查)在培养学生的ct能力方面发挥着重要作用。-r 交互,包括编程计算、观察性调查和参与式调查,显示出培养学生 ct 技能的潜力。这些类型的 s-r 交互允许学生边做边思考,将抽象的程序设计和调试与具体的机器人行为联系起来。
-
创新点
之前的研究很少讨论 s-r交互,然而,应该对其进行探索,因为它提供了更多关于学生自然学习过程的信息,这可能对re 实践有意。
-
第十周 文献阅读02
第十周 文献阅读02第十周 文献阅读02
-
论文基本信息
标题:theeffects of robotics training on children's spatial ability andattitude toward stem
期刊:internationaljournal of social robotics-
实验设计
在本研究中,采用了单组前测-后测设计,这是一种预实验设计。该设计包括对单个组进行预测试测量,然后进行治疗和后测试。根据前测和后测结果比较孩子们的空间能力和对stem的态度。该课程由三个不同小组(每组3名学生)在不同地点同时进行。每个小组都聘请了两名教师,一名科学教师和一名计算机教师。所有老师都有2年的教学和机器人经验。教学活动按照创造性思维螺旋模型进行。该模型有5个组成部分:想象、创造、玩耍、分享和反思。此外,通过创建游戏化场景,将课程中的活动进行游戏化。该课程的活动是由研究人员计划的。中给出了一些描述课程活动的照片。在“想象”阶段,老师们给参与者讲述了一个关于机器人的故事。这个故事涉及现实生活中的问题,需要机器人解决方案。参与者想象了问题的解决方案。然后,老师们引导所有学生找到指南中规定的单一解决方案。在“创造”阶段,学生们按照指南中的说明搭建机器人。在“玩”阶段,老师们带领学生们玩自己的机器人,检查设计问题。在“分享”阶段,同学们和老师们分享了自己的经历、感受和想法。最后,在“反思”阶段,学生们尝试重新设计他们的机器人,以解决发现的问题或为他们的机器人添加功能。
-
采用的机器人设备
legos
-
被试
参与者包括 39名小学生(34 名男孩和5 名女孩,年龄 8-12岁),他们参加了长期(31周)机器人课程。
-
研究结论
1.根据空间能力配对样本t检验结果,儿童空间想象测试成绩从测试前到测试后显着提高。
2.孩子们对stem 的态度显着改善(z−5.086,p < .05,r.81)。 stem 态度量表所有子维度的得分也有所提高。 -
-
- 标签:
- AI in Education
- Learning Motivat
- Autonomous Learn
-
加入的知识群:

.jpg)
学习元评论 (0条)
聪明如你,不妨在这 发表你的看法与心得 ~